- HTA8128 内置升压的60W立体声D类音频功放
- AU6815A集成音频 DSP 的 2×25W 数字型 Cl
- HTN78A3 6V~140V输入,3A实地异步降压变换器
- HT81297 18W内置升压单声道D类音频功放
- NS2583 同步升压型 2A 双节锂电池充电管理 IC
- NLC47022带NTC功能和电量均衡功能电流2A 5V异
- PT2027 单触控双输出 LED 调光 IC
- HT316C兼容HT326C防破音功能免电感滤波2×20WD
- HT3386兼容TPA3118 2×50W D类立体声音频功放
- NS8220 300mW 双声道耳机音频放大器
- HT6875 2.8W防削顶单声道D类音频功率放大器
- HT77221 HT77211 4.0V~30V输入,2A/1.2A同步降压变换器
- NS4117X 系列 外置 MOS 管开关降压型 LED 恒流控制器
- HT71663 13V,12A全集成同步升压转换器
步进电机介绍;
1、什么是步进电机?
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装。
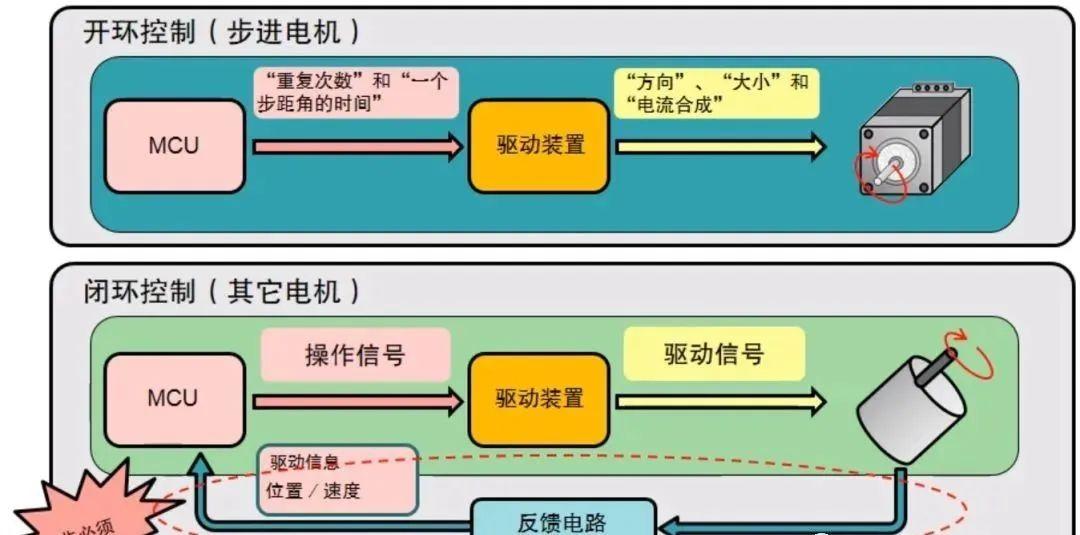
2、步进电机的特点
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。优缺点如下所示。
优点
1. 电机操作易于通过脉冲信号输入到电机进行控制;
2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);
3. 由于没有接触电刷而实现了更大的可靠性。
缺点
1. 需要脉冲信号输出电路;
2. 当控制不适当的时候,可能会出现同步丢失;
3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、目前我司的步进电机马达驱动芯片供大家选型;
| Part No. | Control Interface | Channels | Logic Supply Voltage | Power Supply Voltage | Micro-Step Resolution | Output Current | Packages | p2p |
|---|---|---|---|---|---|---|---|---|
| HR4985 | STEP/DIR | 2 | 3.0–5.5V | 8.0–32V | 1–1/8 | 1.0A | QFN24 | MS4985 |
| HR4988 | STEP/DIR | 2 | 3.0–5.5V | 8.0–32V | 1–1/16 | 2.0A | QFN28 | MS4988 |
| HR8825 | STEP/DIR | 2 | - | 8.0–32V | 1–1/32 | 2.5A | ETSSOP28 | DRV8825 |
| HTD8842 | STEP/DIR | 2 | - | 8.0–40V | 1–1/32 | 2.5A | ETSSOP28 | DRV8825 |
| HTD5832E | STEP/DIR | 2 | - | 4.75–28V | 1–1/256 | 2.5A | QFN28 | MS4988 |
| HTD5833C | STEP/DIR | 2 | - | 4.75–28V | 1–1/256 | 2.5A | QFN28 | ATD5833 |
| HTD9800 | SPI | 5 | 2.7–3.6V | 3.0–5.5V | 1–1/256 | 0.8A | QFN52 MIS44 | ATD41908 |
| HTD9901 | SPI | 5 | 2.7–5.5V | 3.0–5.5V | 1–1/256 | 0.8A | QFN52/44/32/24 | / |
| HTD9900(C) | SPI | 5 | - | 2.7–5.5V | 1–1/256 | 0.8A | QFN20 | / |
| HR3988 | PHS/EN | 4 | 3.0–5.5V | 8.0–32V | 1–1/4 | 1.2A | QFN36 | MS3988 |
| HR8833 | PWM | 2 | - | 2.7–12V | - | 1.5A | ETSSOP16 QFN16 | DRV8833 |
| HR8549 | PHS/EN | 2 | - | 2.7–15V | - | 1.0A | ESOP8 | / |
| HR8550 | PHS/EN | 2 | - | 2.7–28V | - | 1.0A | ESOP8 | / |
上一篇:氮化镓(GaN)赋能D类音频放大器的未来
下一篇:混合信号设计:模拟信号与数字信号